

全国资询服务热线:
020-82516762


应用实例
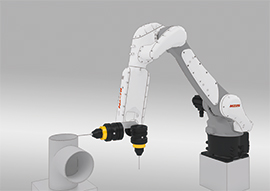

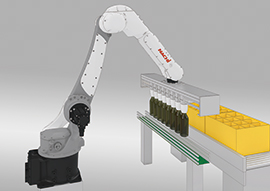


中型中空机器人 MZ25
宽广的动作范围和强劲的手腕,可用于多种用途
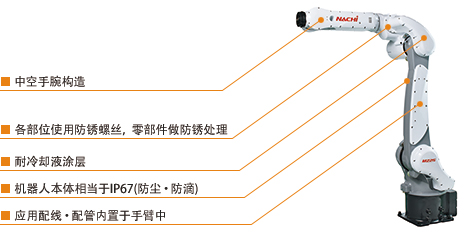
内置线缆可以减少因周边设备与线缆的干扰所产生的动作限制
相当於IP67(防尘、防滴)防冷却、液涂层防锈螺丝・零件皆为标准配备,适用於各种作业环境
充实的标准配备能适用於各种作业环境
-
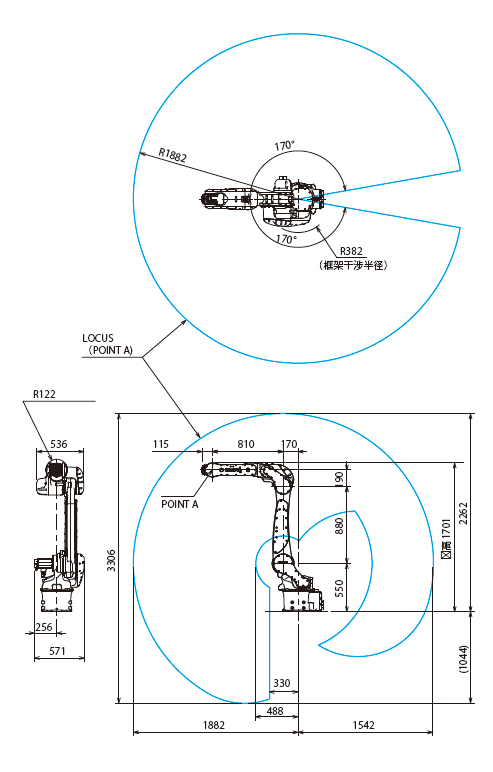
工作范围
-
规格(型号)
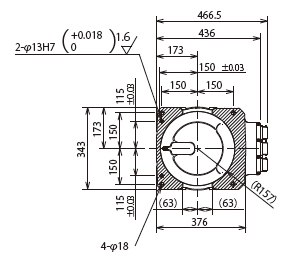
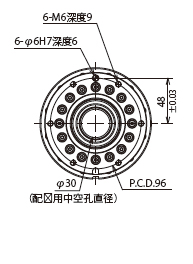
外形尺寸和动作范围
PROVIDE ADVANCED INTELLIGENT AUTOMATIC EQUIPMENT


提供先进的智能自动化设备
联系地址:广州黄埔茅岗路828号广州机械研究院30号楼
联系人:冷生:131 2937 4321
电话:020-82516762
传真:020-82516762
联系我们
